ระบบสายพานลำเลียงกระสวยข้อมูล 4D





สายพานลำเลียง
| โครงการ | ข้อมูลพื้นฐาน | หมายเหตุ |
| แบบอย่าง | SX-LTJ-1.0T-600H แรงบิดสูงสุด | |
| ตัวลดรอบมอเตอร์ | เย็บ | |
| ประเภทโครงสร้าง | โครงสร้างทำจากอลูมิเนียมอัลลอยด์ ส่วนขาและส่วนโค้งทำจากเหล็กกล้าคาร์บอน | |
| วิธีการควบคุม | การควบคุมแบบแมนนวล/แบบสแตนด์อโลน/ออนไลน์/อัตโนมัติ | |
| มาตรการรักษาความปลอดภัย | ระบบล็อคไฟฟ้า, ตัวนำป้องกันทั้งสองด้าน | |
| ยึดถือมาตรฐาน | เจบี/ที7013-93 | |
| น้ำหนักบรรทุก | สูงสุด 1,000 กก. | |
| การตรวจสอบสินค้า | เซ็นเซอร์โฟโตอิเล็กทริค | ป่วย/พ+ฟ |
| รางโซ่ | รางไนลอนแรงเสียดทานต่ำ | |
| โซ่สายพานลำเลียง | ตงหัวเชน | |
| แบริ่ง | ฟูกูยามะฮาร์ดแวร์ ลูกปืนปิดผนึก | |
| ความเร็วในการถ่ายโอน | 12นาที/นาที | |
| การเคลือบผิวและการเคลือบผิว | การดอง การฟอสเฟต การพ่น | |
| การควบคุมเสียงรบกวน | ≤73เดซิเบล | |
| การเคลือบผิว | คอมพิวเตอร์สีเทา | ตัวอย่างที่แนบมา |
โครงสร้างอุปกรณ์
สายพานลำเลียงประกอบด้วยโครง โครงยึด ชุดขับเคลื่อน และอื่นๆ โครงทำจากอลูมิเนียมอัลลอยด์ และปลายทั้งสองด้านเป็นล้อถอยหลังแบบไม่มีฟันที่ยึดแน่น โซ่สายพานลำเลียงเป็นโซ่ตรงสองแถวที่มีระยะพิทช์ P=15.875 มม. ตัวยึดโซ่ทำจากโพลีเอทิลีนโมเลกุลสูง (UHMW) ซึ่งมีผลในการหล่อลื่นตัวเอง โครงยึดที่เชื่อมเชื่อมต่อกับโครงหลักด้วยแผ่นกดสลัก ขาปรับสกรู M20 เชื่อมต่อกับพื้น และสามารถปรับความสูงของพื้นผิวการลำเลียงได้ +25 มม. อุปกรณ์ขับเคลื่อนประกอบด้วยมอเตอร์ลดความเร็วในตัวตรงกลาง ชุดเพลาขับ ชุดเฟืองเกียร์ ที่นั่งมอเตอร์ และอุปกรณ์ปรับความตึงโซ่ และรอกปรับความตึงแบบสกรูจะปรับความตึงโซ่ลำเลียง
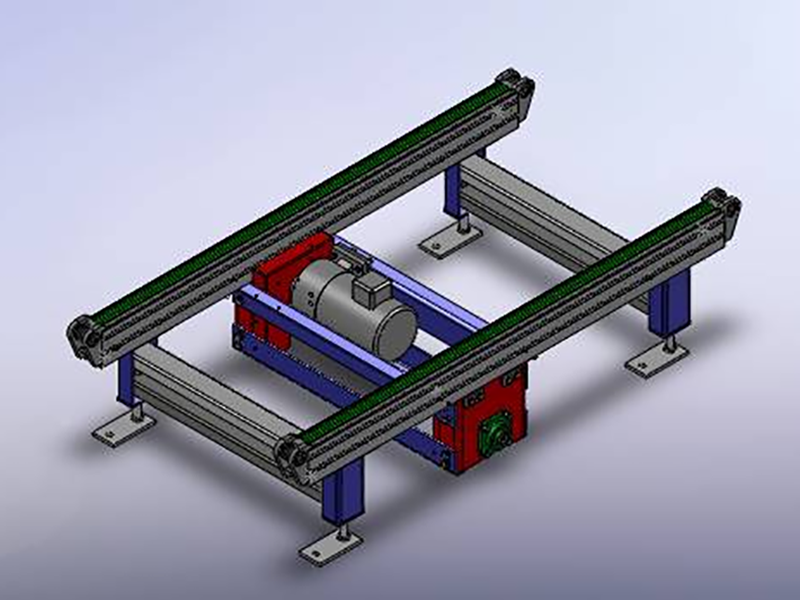
หลักการทำงาน:
มอเตอร์ขับเคลื่อนเพลาขับผ่านกลุ่มส่งกำลัง และเพลาขับขับเคลื่อนโซ่ลำเลียงเพื่อใช้งานฟังก์ชันการลำเลียงของพาเลท
สายพานลำเลียงแบบลูกกลิ้ง
| รายการ | ข้อมูลพื้นฐาน | หมายเหตุ |
| แบบอย่าง | SX-GTJ-1.0T-600H แรงบิดสูงสุด | โครงสร้างเหล็ก |
| ตัวลดรอบมอเตอร์ | เย็บ | |
| ประเภทโครงสร้าง | การดัดเหล็กคาร์บอน | |
| วิธีการควบคุม | การควบคุมแบบแมนนวล/แบบสแตนด์อโลน/ออนไลน์/อัตโนมัติ | |
| น้ำหนักบรรทุก | สูงสุด 1,000 กก. | |
| ความเร็วในการถ่ายโอน | 12นาที/นาที | |
| ลูกกลิ้ง | ลูกกลิ้งโซ่คู่ 76 | |
| โซ่ขับเคลื่อน | โรงงานโซ่หัวตง | |
| แบริ่ง | แกนฮา | |
| การเคลือบผิวและการเคลือบผิว | การดอง การฟอสเฟต การพ่น | |
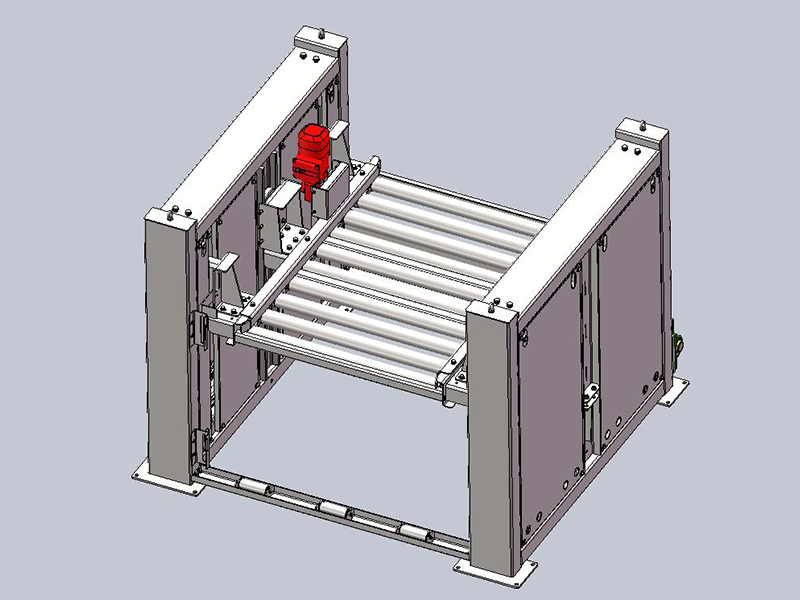
โครงสร้างอุปกรณ์
โครงสร้างอุปกรณ์: เครื่องโต๊ะลูกกลิ้งประกอบด้วยโครง ขาตั้ง ลูกกลิ้ง ไดรฟ์และหน่วยอื่น ๆ ลูกกลิ้ง φ76x3 ลูกกลิ้งสังกะสีแบบเฟืองคู่ด้านเดียว ระยะห่างลูกกลิ้ง P = 174.5 มม. เฟืองคู่ด้านเดียว ขาตั้งเชื่อมเชื่อมต่อกับโครงหลักด้วยแผ่นกดโบลต์ ขาปรับสกรู M20 เชื่อมต่อกับพื้น และสามารถปรับความสูงของพื้นผิวการลำเลียงได้ +25 มม. อุปกรณ์ขับเคลื่อนประกอบด้วยมอเตอร์ลดความเร็วในตัวตรงกลาง ชุดเฟืองส่งกำลัง ที่นั่งมอเตอร์ และอุปกรณ์ปรับความตึงโซ่
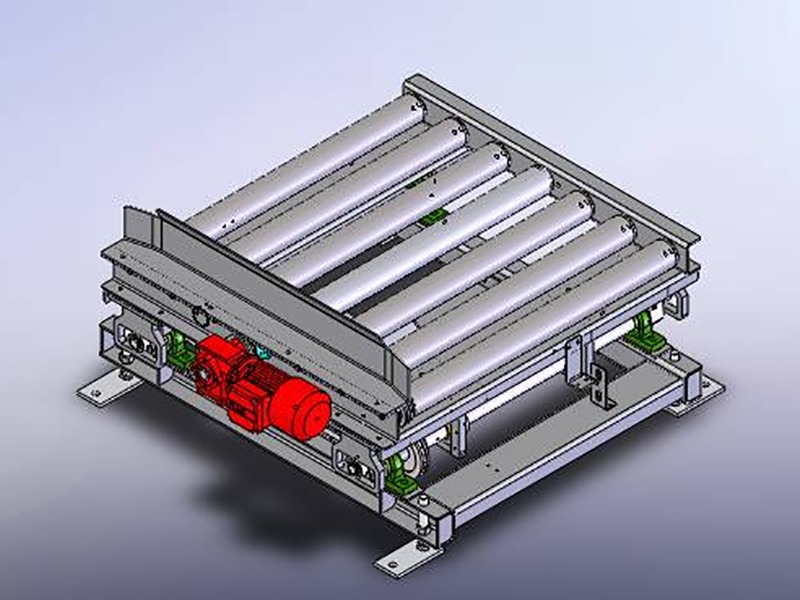
หลักการทำงาน: มอเตอร์ขับเคลื่อนลูกกลิ้งผ่านโซ่ และลูกกลิ้งจะถูกส่งไปยังลูกกลิ้งที่อยู่ติดกันผ่านโซ่อื่น จากนั้นจึงส่งต่อไปยังลูกกลิ้งอื่นเพื่อดำเนินฟังก์ชันการลำเลียงของสายพานลำเลียง
เครื่องยกและเคลื่อนย้าย
| โครงการ | ข้อมูลพื้นฐาน | หมายเหตุ |
| แบบอย่าง | SX-YZJ-1.0T-6 0 0H | โครงสร้างเหล็ก |
| ตัวลดรอบมอเตอร์ | เย็บ | |
| ประเภทโครงสร้าง | การดัดเหล็กคาร์บอน | |
| วิธีการควบคุม | การควบคุมแบบแมนนวล/แบบสแตนด์อโลน/ออนไลน์/อัตโนมัติ | |
| มาตรการรักษาความปลอดภัย | ระบบล็อคไฟฟ้า, ตัวนำป้องกันทั้งสองด้าน | |
| มาตรฐาน | เจบี/ที7013-93 | |
| น้ำหนักบรรทุก | สูงสุด 1,000 กก. | |
| การตรวจสอบสินค้า | เซ็นเซอร์โฟโตอิเล็กทริค | ป่วย/พ+ฟ |
| ลูกกลิ้ง | ลูกกลิ้งโซ่คู่ 76 | |
| ตลับลูกปืนและตัวเรือน | ตลับลูกปืน: เพลาฮาร์บิน; เบาะตลับลูกปืน: Fushan FSB | |
| ความเร็วในการถ่ายโอน | 12นาที/นาที | |
| การเคลือบผิวและการเคลือบผิว | การดอง การฟอสเฟต การพ่น | |
| การควบคุมเสียงรบกวน | ≤73เดซิเบล | |
| การเคลือบผิว | คอมพิวเตอร์สีเทา | ตัวอย่างที่แนบมา |
โครงสร้างอุปกรณ์
โครงสร้างอุปกรณ์: เครื่องถ่ายโอนลูกกลิ้งประกอบด้วยชิ้นส่วนการลำเลียง กลไกการยก ส่วนประกอบการนำทาง และหน่วยอื่นๆ การปรับความสูงของพื้นผิวการลำเลียง +25 มม. กลไกการยกใช้หลักการของแขนข้อเหวี่ยงขับเคลื่อนด้วยมอเตอร์ และอุปกรณ์ขับเคลื่อนประกอบด้วยมอเตอร์ลดรอบในตัวตรงกลาง ชุดเฟืองเกียร์ เบาะมอเตอร์ และอุปกรณ์ปรับความตึงโซ่
หลักการทำงาน: เมื่อพาเลทถูกส่งไปที่อุปกรณ์โดยสายพานลำเลียงที่ตรงกัน มอเตอร์ยกของจะทำงานเพื่อขับเคลื่อนกลไกแบบลูกเบี้ยวเพื่อยกพาเลท และมอเตอร์ยกของจะหยุดเมื่ออยู่ในตำแหน่งนั้น มอเตอร์ลำเลียงจะทำงานเพื่อลำเลียงพาเลทไปยังอุปกรณ์เชื่อมต่อ จากนั้น มอเตอร์จะหยุด มอเตอร์ยกของจะทำงาน และกลไกแบบลูกเบี้ยวจะถูกขับเคลื่อนเพื่อลดอุปกรณ์ลง และเมื่ออยู่ในตำแหน่งนั้น มอเตอร์ยกของจะหยุดทำงานเพื่อทำงานให้ครบวงจร
สายพานลำเลียงทรานสิชั่น
| 1) โครงการ | ข้อมูลพื้นฐาน | หมายเหตุ |
| แบบอย่าง | SX-GDLTJ-1.0T-500H-1.6L | |
| ตัวลดรอบมอเตอร์ | เย็บ | |
| ประเภทโครงสร้าง | ขาและเหล็กคาร์บอนดัด | |
| วิธีการควบคุม | การควบคุมแบบแมนนวล/แบบสแตนด์อโลน/ออนไลน์/อัตโนมัติ | |
| มาตรการรักษาความปลอดภัย | ระบบล็อคไฟฟ้า, ตัวนำป้องกันทั้งสองด้าน | |
| มาตรฐาน | เจบี/ที7013-93 | |
| น้ำหนักบรรทุก | สูงสุด 1,000 กก. | |
| การตรวจสอบสินค้า | เซ็นเซอร์โฟโตอิเล็กทริค | ป่วย/พ+ฟ |
| รางโซ่ | รางไนลอนแรงเสียดทานต่ำ | |
| โซ่สายพานลำเลียง | ตงหัวเชน | |
| ตลับลูกปืนและตัวเรือน | ตลับลูกปืน: เพลาฮาร์บิน, เบาะตลับลูกปืน: Fukuyama FSB | |
| ความเร็วในการถ่ายโอน | 12นาที/นาที | |
| การเคลือบผิวและการเคลือบผิว | การดอง การฟอสเฟต การพ่น | |
| การควบคุมเสียงรบกวน | ≤73เดซิเบล | |
| การเคลือบผิว | คอมพิวเตอร์สีเทา | ตัวอย่างที่แนบมา |
โครงสร้างอุปกรณ์
โครงสร้างอุปกรณ์: อุปกรณ์นี้ใช้ที่ข้อต่อระหว่างรอกและชั้นวาง และสายพานลำเลียงประกอบด้วยโครง ขาค้ำยัน และชุดขับเคลื่อน โซ่สายพานลำเลียงเป็นโซ่ตรงสองแถวที่มีระยะพิทช์ P=15.875 มม. ตัวยึดโซ่ทำจากโพลีเอทิลีนโมเลกุลสูง (UHMW) ซึ่งมีผลในการหล่อลื่นตัวเอง ขาเชื่อม เชื่อมต่อกับตัวชั้นวาง อุปกรณ์ขับเคลื่อนประกอบด้วยมอเตอร์ลดความเร็วในตัวตรงกลาง ชุดเพลาขับ ชุดเฟืองเกียร์ ที่นั่งมอเตอร์ และอุปกรณ์ปรับความตึงโซ่ และรอกปรับความตึงแบบสกรูที่ปรับความตึงโซ่ลำเลียง
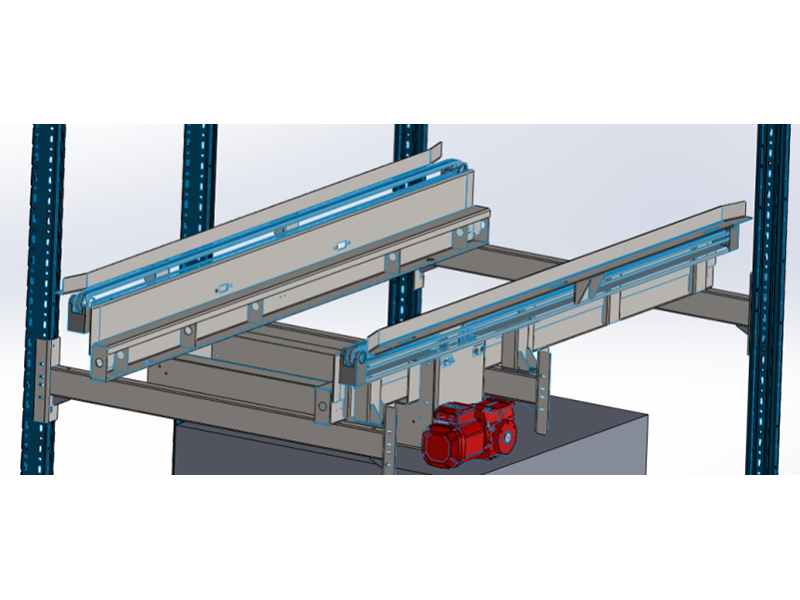
หลักการทำงาน: มอเตอร์ขับเคลื่อนเพลาขับผ่านกลุ่มส่งกำลัง และเพลาขับขับเคลื่อนโซ่ลำเลียงเพื่อให้เกิดฟังก์ชันการลำเลียงของพาเลท
ลิฟท์พื้น
| โครงการ | ข้อมูลพื้นฐาน | หมายเหตุ |
| แบบอย่าง | แอลดีทีเอสเจ-1.0T-700H | โครงสร้างเหล็ก |
| ตัวลดรอบมอเตอร์ | เย็บ | |
| ประเภทโครงสร้าง | เสา: เหล็กกล้าคาร์บอนดัด ด้านนอก: ซีลแผ่นเหล็ก | |
| วิธีการควบคุม | การควบคุมแบบแมนนวล/แบบสแตนด์อโลน/ออนไลน์/อัตโนมัติ | |
| มาตรการรักษาความปลอดภัย | อุปกรณ์ล็อคไฟฟ้าป้องกันการตก | |
| มาตรฐาน | เจบี/ที7013-93 | |
| น้ำหนักบรรทุก | สูงสุด 1,000 กก. | |
| การตรวจสอบสินค้า | เซ็นเซอร์โฟโตอิเล็กทริค | ป่วย/พ+ฟ |
| ลูกกลิ้ง | ลูกกลิ้งโซ่คู่ 76 | |
| โซ่ยกของ | ตงหัวเชน | |
| แบริ่ง | ตลับลูกปืนทั่วไป: ตลับลูกปืนเพลาฮาร์บิน: NSK | |
| ความเร็วในการวิ่ง | ความเร็วในการลำเลียง: 16ม./นาที ความเร็วในการยก: 6ม./นาที | |
| การเคลือบผิวและการเคลือบผิว | การดอง การฟอสเฟต การพ่น | |
| การควบคุมเสียงรบกวน | ≤73เดซิเบล | |
| การเคลือบผิว | คอมพิวเตอร์สีเทา | ตัวอย่างที่แนบมา |
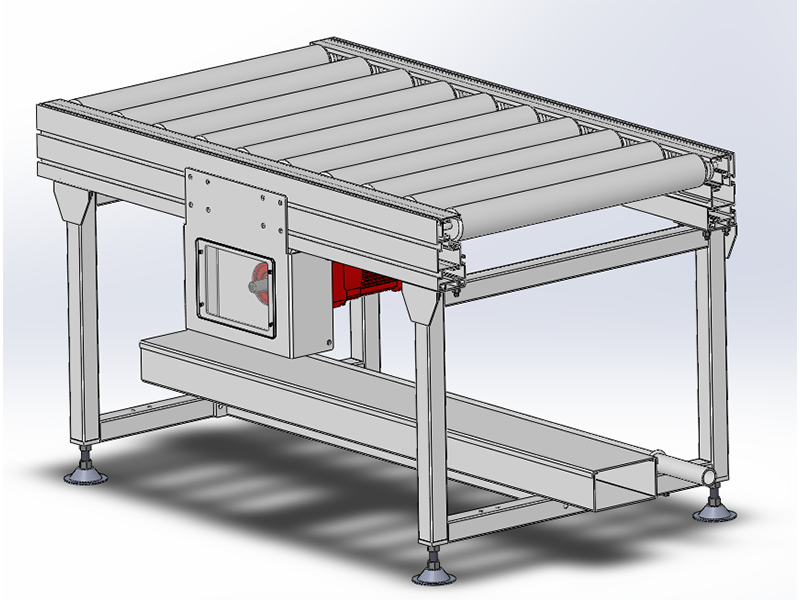
โครงสร้างหลักและคุณสมบัติ
โครง: ใช้แผ่นเหล็กกล้าคาร์บอนดัดหนา 5 มม. เป็นเสา และด้านนอกปิดผนึกด้วยแผ่นเหล็ก
ส่วนยก:
มีการติดตั้งเฟรมยกไว้ที่ด้านบนของรอก โดยเฟรมทำจากเหล็กกล้าคาร์บอน และมอเตอร์ยกจะขับเคลื่อนชุดเฟืองยกเพื่อให้ทำงานผ่านโซ่
แพลตฟอร์มการโหลด:
ผลิตจากเหล็กกล้าคาร์บอน แพลตฟอร์มบรรทุกมีสายพานลำเลียงมาตรฐาน
หลักการทำงาน:
มอเตอร์ยกขับเคลื่อนแพลตฟอร์มการโหลดเพื่อให้การทำงานยกเสร็จสมบูรณ์ สายพานลำเลียงบนแพลตฟอร์มการโหลดสามารถทำให้สินค้าเข้าและออกจากลิฟต์ได้อย่างราบรื่น



